
Additional Information
Self-calibration is a powerful technique for separating error sources in 2D coordinate measuring machines [1,2]. This was shown in the recent paper “A new general approach for solving the self-calibration problem on large area 2D ultra-precision coordinate measurement”.
The algorithm presented in the paper has been further developed and is now used for accurate calibrations of ordinary cameras using artifacts with more or less un-known locations of measurements marks. Using cameras for precision measurement is a challenge because of spatial distortions occurring in the image capturing process. These distortions depend on factors as the quality of the lens, focus and the sensor it-self. It is therefore very important to calibrate the system before it can be used for precise measurements.
By using three images of an artifact it is possible to separate the shape of the artifact itself and the distortion occurring in the image capturing process. This can be demonstrated by using a simulated example of a flat artifact, with a matrix of measurement marks, and a camera with some barrel distortion. The aim is then to find the shape of the artifact used and the shape of the so called Camera Correction Function (CCF). The three images are shown in figure 1.

Figure 1: Three measurements of an artifact using three different views, 0-degree, 90-degree and a shifted 90-degree view. The simulated barrel distortion of the camera system is highly exaggerated for clarity.
Results
After having run the self-calibration algorithm, that is an iterative process, we obtain the results shown in figure 2.
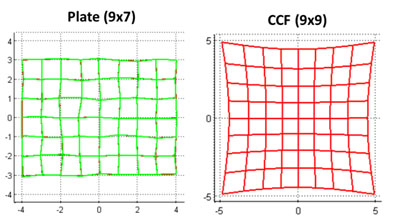
Figure 2: The result is the absolute shape of the artifact (Plate) and the pin-cushion shaped CCF.
As seen in figure 2 the combined distortion from the camera system and the deviations of the measurement marks (cf figure 1) has been separated into two different sources of error.
Conclusion
After a successful calibration the Camera Correction Function is used to make a spatial correction of locations of features in the images. As a bonus the absolute shape of the calibration artifact is also obtained with high accuracy. In other words we have achieved a known reference (the Plate in figure 2) that can be used for verification of the calibration or as a reference when calibrating other camera systems.
Journal Reference
Meas. Sci. Technol. 25 055001, 2014.
Peter Ekberg1,2, Lars Stiblert1 and Lars Mattsson2
1 Micronic Mydata AB, Box 3141, SE-183 03 Täby, Sweden and
2 Industrial Metrology and Optics, Production Engineering, KTH Royal Institute of Technology, SE-100 44 Stockholm, Sweden.
Abstract
The manufacturing of flat panel displays requires a number of photomasks for the placement of pixel patterns and supporting transistor arrays. For large area photomasks, dedicated ultra-precision writers have been developed for the production of these chromium patterns on glass or quartz plates. The dimensional tolerances in X and Y for absolute pattern placement on these plates, with areas measured in square meters, are in the range of 200–300 nm (3σ). To verify these photomasks, 2D ultra-precision coordinate measurement machines are used having even tighter tolerance requirements. This paper will present how the world standard metrology tool used for verifying large masks, the Micronic Mydata MMS15000, is calibrated without any other references than the wavelength of the interferometers in an extremely well-controlled temperature environment. This process is called self-calibration and is the only way to calibrate the metrology tool, as no square-meter-sized large area 2D traceable artifact is available. The only parameter that cannot be found using self-calibration is the absolute length scale. To make the MMS15000 traceable, a 1D reference rod, calibrated at a national metrology lab, is used. The reference plates used in the calibration of the MMS15000 may have sizes up to 1 m2 and a weight of 50 kg. Therefore, standard methods for self-calibration on a small scale with exact placements cannot be used in the large area case. A new, more general method had to be developed for the purpose of calibrating the MMS15000. Using this method, it is possible to calibrate the measurement tool down to an uncertainty level of <90 nm (3σ) over an area of (0.8 × 0.8) m2. The method used, which is based on the concept of iteration, does not introduce any more noise than the random noise introduced by the measurements, resulting in the lowest possible noise level that can be achieved by any self-calibration method.
