
Significance
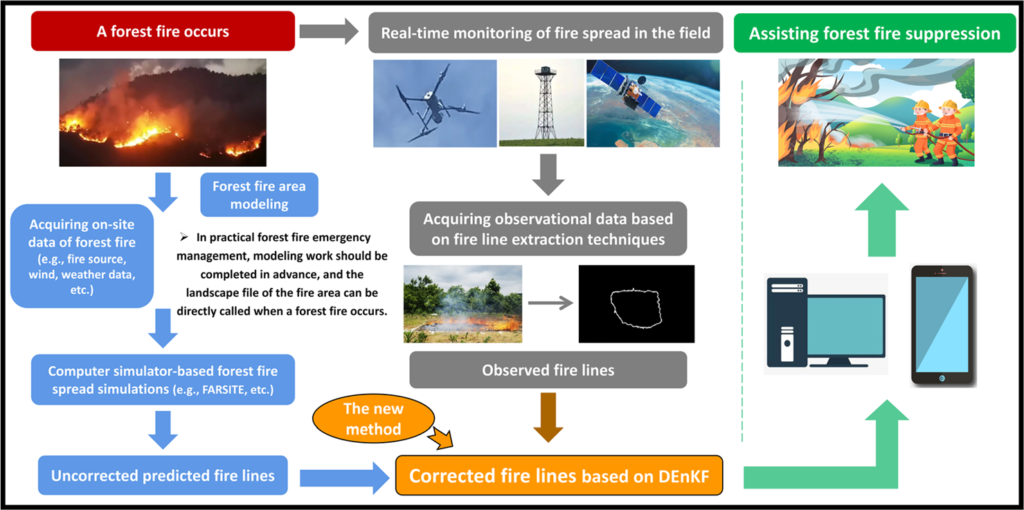
Predicting how a forest fire will unfold is still not straightforward, even with the considerable progress in fire-behavior research and anyone working in wildfire science knows that a forecast is only as good as the conditions it relies on, and those conditions shift rapidly during an active event. Responders often need a sense of where a fire is heading hours before it arrives, however, the environmental factors shaping its trajectory (wind, moisture, terrain) rarely behave in a tidy or predictable way. This is why, over the past few decades, researchers have built a wide range of modeling tools that attempt to capture the mechanics of fire spread, from physics-driven models rooted in combustion theory to empirical and semi-empirical systems designed for operational use. FARSITE has emerged as a mainstay among these tools, largely because it can combine diverse inputs—fuel types, topography, weather—into a single simulation. But even FARSITE, despite its maturity, struggles when the initial conditions are even slightly off. A minor shift in the ignition point or an unexpected change in wind can send the forecast drifting away from reality in a matter of hours. Because of these gaps, the field has increasingly turned toward data assimilation as a way to bring simulations back in line with what is actually happening on the ground. Borrowed initially from atmospheric science, data assimilation offers a structured way to blend model estimates with real observations. Within wildfire applications, researchers have tested several approaches—from the ensemble Kalman filter to particle filtering and various optimization heuristics—to tighten the link between predicted and observed fireline positions. These methods have produced promising results, but they also come with trade-offs. The standard EnKF, for example, injects noise into observations to maintain ensemble variability, an approach that works in some settings but can introduce unnecessary instability when dealing with strongly nonlinear processes like fire spread. This has encouraged interest in more stable alternatives. The deterministic ensemble Kalman filter (DEnKF) is one such method, updating ensemble members without artificially perturbing the observations. In theory, this should reduce sampling error and improve consistency over repeated assimilation cycles. However, despite these advantages, DEnKF has received surprisingly little attention in wildfire modeling, which leaves an opportunity for closer examination and practical evaluation. To this account, new research paper published in Fire Technology and conducted by Tianyu Wu, Professor Qixing Zhang, Professor Jiping Zhu, Liuheng Xu & Professor Yongming Zhang from the State Key Laboratory of Fire Science at the University of Science and Technology of China, researchers developed a dynamic correction framework that couples FARSITE fire-spread simulations with a deterministic ensemble Kalman filter to update fireline predictions as new observations arrive. Their approach avoids the observation perturbations used in traditional EnKF, resulting in more stable and accurate corrections. They also built a functional “Forest Fire Spread Prediction and Assimilation” system capable of real-time operational use.
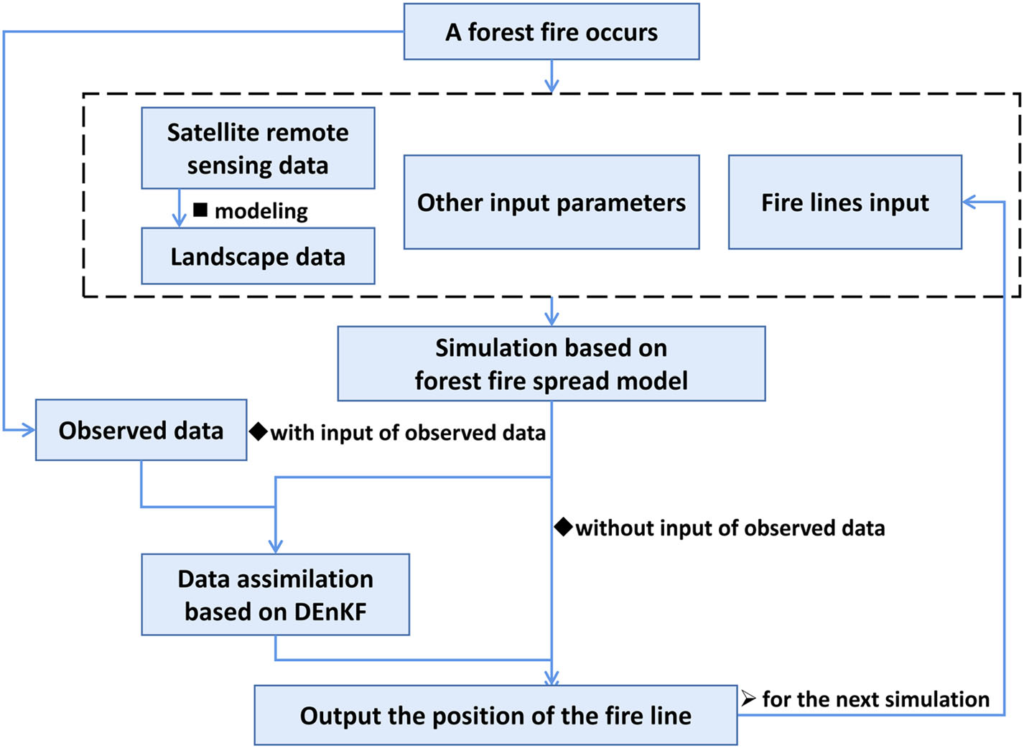
Briefly, the research team first constructed controlled Observing System Simulation Experiments (OSSEs) to isolate how well DEnKF can correct perimeter predictions produced by FARSITE. They begin by modeling a region in southwestern China—a mountainous landscape near Erhai Lake—chosen specifically for its irregular terrain, which naturally generates inflection points in firelines. They assemble a detailed landscape file from ASTER GDEM elevation data, Landsat-derived NDVI imagery, and vegetation classifications mapped to Anderson fuel models. This modeling step ensures that the baseline simulation resembles conditions encountered in real fires while still allowing the authors to manipulate the underlying input errors. The authors generated three parallel trajectories to evaluate correction performance. The “real group” relies on accurate ignition coordinates and actual wind data. The “simulation group” begins with a misaligned ignition point, allowing error to accumulate over time. Finally, the assimilation groups start from the same flawed initial perimeter but incorporate noisy observations—created by adding random 100-m perturbations to the real fireline—at hourly intervals. These observations serve as the reference for updating the ensemble. The DEnKF implementation proceeds by first producing 20 perturbed ignition locations, each generating a forecasted perimeter via FARSITE. After each forecast step, the algorithm computes covariances between simulated and observed marker points, calculates a deterministic Kalman gain, and shifts each ensemble member toward the observed fireline without artificially disturbing the observations. The ensemble mean becomes the corrected perimeter.
The team found the simulation group rapidly diverges from the real perimeter, with RMSE surging past 200 m early in the burn window and climbing steeply beyond 14 hours. Both filters significantly reduce this deviation, however, DEnKF consistently produces tighter convergence, particularly around fireline inflection points. These are the locations where standard elliptical spread assumptions fail most visibly, and the deterministic update appears better at stabilizing corrections without exaggerating noise. When wind conditions are unknown—a much more realistic scenario—the simulation errors grow dramatically. Nevertheless, DEnKF still trims the RMSE to levels substantially below those of the uncorrected simulation, though its corrections lose strength over long durations as wind-induced discrepancies accumulate. The authors also performed sensitivity analyses and found that increasing the ensemble size improves accuracy only up to about 20 members; beyond that, computational cost climbs with little additional benefit. On the other hand, reducing assimilation frequency weakens correction but still yields major improvements even when updates occur every two or four hours.
In conclusion, University of Science and Technology of China scientists offered a more reliable pathway for integrating simulation and observation in wildfire forecasting. Even though the analysis is built on synthetic experiments, the conditions they replicate mirror many situations encountered in actual fire management—uncertain ignition points, variable winds, and imperfect observations delivered at irregular intervals. What makes the results especially compelling is the stability of DEnKF across these imperfect conditions. Instead of amplifying noise, the deterministic update yields corrections that remain smooth and physically plausible, allowing the model to align with observed fire behavior without creating artificial oscillations.
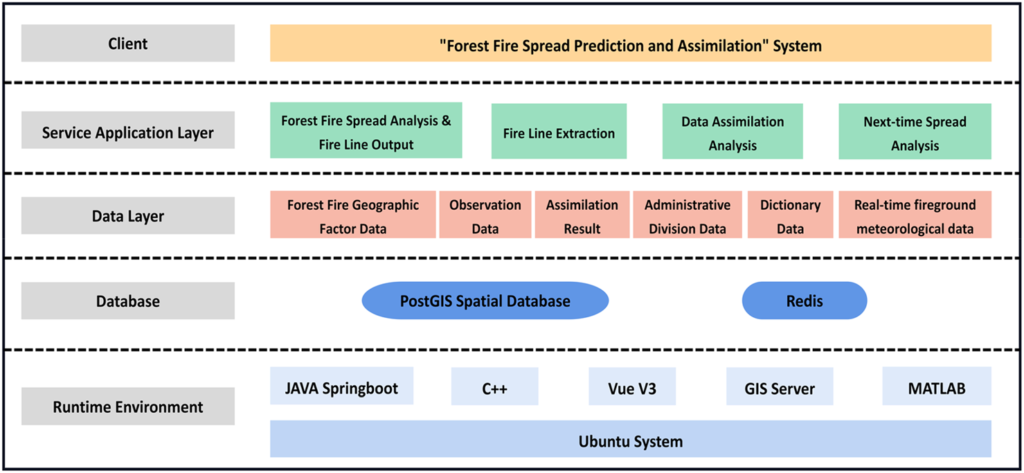
We believe, the implications extend beyond refined algorithms and forest fire forecasting sits within a real operational environment where emergency teams must weigh fuel conditions, resource deployment, evacuation timing, and the protection of critical infrastructure. Prediction errors near the fireline’s inflection points can lead to misjudgments about spread direction, which in turn affects containment strategies. The authors successfully highlighted a practical benefit: more trustworthy spatial guidance when terrain-induced irregularities dominate fire behavior by showing that DEnKF provides clear advantages at these geometrically sensitive locations. Moreover, the new work also reframes how prediction systems should evolve. Rather than treating simulators and observations as separate domains, the proposed framework binds them into a continuous loop—simulate, compare, correct, and simulate again. This philosophy supports the broader shift toward dynamic, data-driven emergency management. The authors go further by integrating the algorithm into a functional “Forest Fire Spread Prediction and Assimilation” system, capable of receiving real-time observational inputs and refreshing forecasts through an interactive web interface. Such a system, if deployed at scale, could offer rapid updates to field commanders, aligning decisions with the latest fire conditions instead of relying on outdated forward projections.
We think it is equally important what the study discuss model uncertainty and they showed that long-term forecasts inevitably degrade when wind conditions remain unknown, reminding practitioners that no correction algorithm can compensate indefinitely for missing environmental information. The method works best when combined with timely, spatially resolved observations—a point that supports ongoing efforts to expand drone-based imaging, infrared mapping, and satellite data downlink speeds. Beyond wildfire applications, the study highlights the value of deterministic ensemble filtering for other nonlinear geophysical systems where observations arrive intermittently and state variables deviate from Gaussian assumptions. Although fire behavior includes smoldering, incomplete combustion, and other non-Gaussian features, the deterministic filter still proved effective, suggesting that hybrid approaches or future extensions may further improve resilience in such complex regimes. In sum, the authors provided an excellent improved correction tool, as well as conceptual blueprint for how predictive wildfire systems should interact with real-time data as fires unfold.





Reference
Tianyu Wu, Qixing Zhang, Jiping Zhu, Liuheng Xu & Yongming Zhang. Forest Fire Spread Prediction and Assimilation Using the Deterministic Ensemble Kalman Filter. Fire Technol 61, 2467–2492 (2025). https://doi.org/10.1007/s10694-024-01690-x