
Significance
Ultra-precision diamond turning has gradually expanded from the production of smooth optical surfaces toward the controlled generation of micro- and nano-scale topographies whose function depends as much on geometry as on surface finish. Within that shift, microchannels on cylindrical substrates have become particularly relevant, not simply as geometric features but as structures that influence wettability, fluid transport, and thermal behavior. Their fabrication, however, imposes a combination of constraints that are not easily reconciled within existing machining paradigms. The tool must follow controlled trajectories at small scales while maintaining stability over comparatively large displacements, and the resulting surface must remain free of discontinuities or residual artifacts that degrade performance. Fast tool servo systems have long been used to introduce controlled, high-frequency motion into ultra-precision cutting. When extended to two degrees of freedom, such systems offer a route toward generating more complex surface morphologies, including structures with coupled depth and orientation features but the transition from conceptual capability to practical implementation has proven difficult. A persistent issue lies in the inability of conventional designs to simultaneously deliver large stroke, high operational frequency, and cleanly decoupled motion along orthogonal axes. Serial configurations tend to provide good decoupling but suffer from inertia accumulation and limited bandwidth, whereas parallel architectures can provide dynamic advantages but introduce coupling between axes that can increase control demands and limit positioning precision. These limitations become especially pronounced in cylindrical microchannel fabrication. Existing approaches based on slow tool servo motion allow large displacements but operate at low speed, while methods relying on fast tool servo motion often reconstruct channels through overlapping micro-dimples, which can leave residual material at intersection boundaries and affect surface quality. The technical gap is therefore in the structural design: a mechanism is needed that can amplify the inherently small displacement of piezoelectric actuators, maintain high dynamic responsiveness, and preserve independent motion along each axis without adding substantial structural or control complexity. In a recent research paper published in International Journal of Mechanical Sciences, Mr. Qinghou Cheng, Professor Yangkun Zhang, Professor Yingxue Yao, and Professor Yang Yang from the Harbin Institute of Technology (Shenzhen) developed a parallel two-degree-of-freedom piezoelectric tool holder that integrates displacement amplification and mechanical motion decoupling within a compact flexural structure. The design achieves large stroke and high resonant frequency without relying on control-based decoupling strategies. They also established a coordinated turning method that uses independent axis control to fabricate microchannels with tunable depth and orientation.
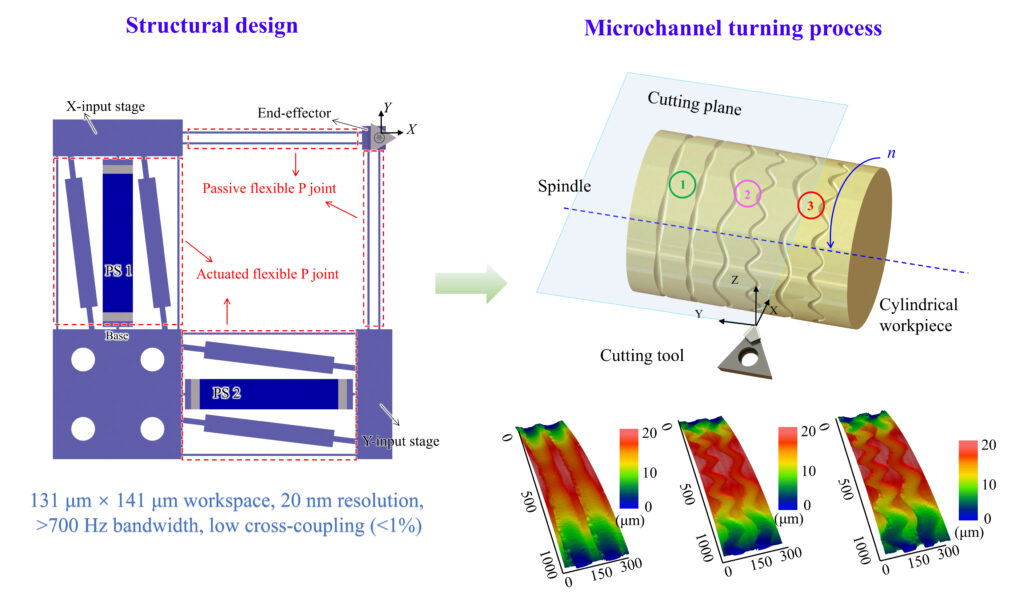
Briefly, the proposed tool holder is organized around a parallel configuration in which two input stages are independently driven by piezoelectric stacks and connected to a common end-effector through a system of actuated and passive flexural joints. Each axis is guided by a pair of prismatic mechanisms that enforce motion along a single direction while suppressing parasitic displacement. The structural novelty lies in the integration of two distinct parallelogram mechanisms within each actuated joint: one provides displacement amplification through controlled flexural deformation, while the other enforces kinematic guidance to maintain linear motion. This arrangement produces an interesting consequence. Because displacement amplification arises from geometric transformation rather than additional structural modules, the mechanism avoids the increase in inertia typically associated with extended amplification stages. At the same time, the use of passive flexural joints aligned with each axis ensures that motion transmitted to the end-effector remains directionally constrained, effectively achieving mechanical decoupling without reliance on control algorithms. To understand how this configuration behaves under load and excitation, the authors construct a dynamic stiffness model in which the mechanism is discretized into rigid bodies and flexural elements. Each flexible component contributes a frequency-dependent stiffness matrix, and the global behavior emerges from the equilibrium of forces and moments across all nodes. This modeling approach allows both static characteristics, such as stroke and stiffness, and dynamic properties, including resonant frequencies, to be evaluated within a unified framework.
Systematic variation of key geometric parameters reveals a fundamental trade-off between stroke and resonant frequency. Increasing the tilt angle of the amplification mechanism, for example, enhances frequency response but eventually reduces displacement, while changes in beam thickness alter stiffness and frequency in opposite directions. The optimization strategy therefore does not pursue a single objective but instead balances competing requirements by imposing constraints on minimum stroke and stiffness while maximizing resonant frequency. The resulting design achieves a calculated stroke of approximately 136 μm and a first resonant frequency near 924 Hz, indicating that the structural configuration can sustain both large displacement and high-speed operation. The authors performed finite element simulations to provide a secondary check on these predictions and found that the simulated stroke, stiffness, and modal frequencies remain within roughly ten percent of the analytical values, with discrepancies attributed mainly to the idealization of rigid bodies in the theoretical model. Stress analysis shows that peak stresses remain below material yield limits, suggesting that the compliant elements operate within a stable deformation regime. The team found that under low-frequency sinusoidal excitation, the tool holder produces strokes of 131 μm along the X-axis and 141 μm along the Y-axis, with cross-coupling ratios below one percent in both directions. This low level of coupling is particularly significant because it reflects structural rather than control-based decoupling which means that each axis can be driven independently without compensation strategies. Moreover, their dynamic testing further indicated that the system maintains resonant frequencies above 700 Hz in both directions, with stable amplitude response up to several hundred hertz. Positioning resolution, measured using high-precision displacement sensors, reaches approximately 18–19 nm, demonstrating that large stroke capability does not come at the expense of fine positional control. The study then moves from characterization to application by integrating the tool holder into a cylindrical turning setup. Here, the two axes are assigned distinct functional roles: motion along the cutting depth direction controls hierarchical features of the microchannels, while motion along the feed direction governs their orientation relative to the rotating workpiece.
Fabrication experiments illustrate how different signal inputs translate into surface morphology. Single-axis excitation along the depth direction generates periodic variations in channel depth, while excitation along the feed direction produces oriented patterns governed by spindle rotation. When both axes are actuated simultaneously, the resulting structures exhibit controlled variation in both depth and orientation, with measured dimensions closely matching theoretical predictions. The consistency of wavelength and amplitude across different operating conditions indicates that the mechanical decoupling remains effective during actual cutting, not only in isolated tests. The most immediate engineering value of the work of Harbin Institute of Technology researchers is in the fabrication of cylindrical microchannels whose geometry can be precisely controlled especially that the tool holder allows the channel depth, or hierarchical feature, and the channel orientation to be adjusted independently or in combination. The study links such microchannel structures to wettability control, directional droplet transport, and heat dissipation, all of which depend strongly on how fluids interact with textured surfaces. In that sense, the cylindrical surface is not just patterned; it is given a programmable microgeometry that can influence how liquids spread, adhere, or move along the surface.
A second important application is high-efficiency machining of complex microstructured surfaces. Because the tool holder combines large stroke, high operational bandwidth, nanoscale positioning resolution, and very low cross-axis coupling, it can generate controlled two-dimensional tool paths during turning rather than relying on slower servo motion or overlapping micro-dimples. This is important because the investigators are addressing both productivity and surface quality at the same time: the process can produce orientation-controllable hierarchical microchannels continuously on curved surfaces while avoiding the residual boundary defects associated with dimple-overlap methods. The engineering implication is that complex cylindrical surface morphologies can be formed more directly, with the final geometry governed by the coordinated input signals rather than by mechanical limitations of the actuator system.



Reference
Qinghou Cheng, Yangkun Zhang, Yingxue Yao, Yang Yang, A decoupled large-stroke 2-DOF tool holder for ultra-precision turning cylindrical-microchannels, International Journal of Mechanical Sciences, Volume 304, 2025, 110715,
Go to International Journal of Mechanical Sciences