
Significance Statement
Shimmy vibration is an oscillatory motion in the fork-wheel assemblage about the steering axle that presents a significant problem in aircraft landing gear system, motorcycles and in car tire dynamics. The phenomenon is caused by tire-road interaction, and for this reason, a number of mathematical models have been developed in order to represent friction and tire dynamic actions.
Shimmy vibration may occur if the aircraft taxing velocity is higher than the critical value. As a consequence, the shimmy oscillation amplitude can rise at a higher rate, therefore, damaging the landing gear before the damage can be averted. A landing gear system susceptible to shimmy vibration demands an increase in the strut torsional stiffness in a bid to reduce the shimmy vibration amplitude and a damping system with sufficient capacity to dissipate the energy out of the landing gear system.
In a recent paper published in Mechanical Systems and Signal Processing Dr. Calogero Orlando and Engineer Andrea Alaimo presented a numerical model and a stochastic robustness analysis of an active shimmy controller implementing an electromechanical actuator with torsional free play and plant uncertainties. They adopted a Decline Population Swarm Optimization method in order to pick practical parameters for the controller. They considered a nonlinear nose landing gear shimmy vibration model, which accounts for electromechanical actuator saturation.
The authors used kinematic variables, such as turning tube rotation angle, tire sideslip angle, and fork-wheel assembly rotation’s angle, in order to describe the shimmy motion of the proposed system. They adopted the particle swarm optimization method based on a decline population model, which is a stochastic model whose particles are in a problem space by means of positional variables. The procedure solves the problem for each swarm particle and evaluates a priori chosen function finding its lowest value. At every iteration step, the particles move by following neighboring particles’ success. The process is repeated until a stable solution is found.
The authors studied open and closed loop system characteristics under varying case studies and the impact of torsional free play on the landing gear. They selected four case studies, namely tire damage, initial disturbed yaw angle decreasing velocity, rough runaway, and rough runaway under increasing velocity. This was followed by the solution of the nonlinear equations of motion characterizing shimmy vibration assuming that the actuator was absent.
Therefore, they proposed a PID controller with derivative filter and anti-windup schemes to damp the shimmy vibration. An alternative swarm optimizer, which was based on a demographic decline model, was employed in order to tune the PID parameters. The parameters were obtained and used to analyze the closed loop system under varying test conditions. They found that the proposed controller rejected shimmy vibrations.
The presence of torsional free play was taken into account and the team found that free play reduced the shimmy critical taxing velocity, modified transient response and that limit cycle oscillations of small amplitudes appeared in the closed loop system response. Results for tire damage case are summarized in figure.
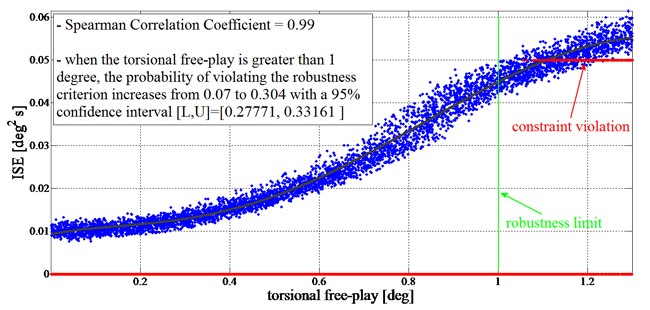
In the absence of free play, the controller met literature robustness stipulations. Through the stochastic analysis of the nose landing gear active controller, the team found that the presence of free play uncertainty enabled them to verify the robustness of the proposed controller when the torsional free play was below the 1° limiting value.
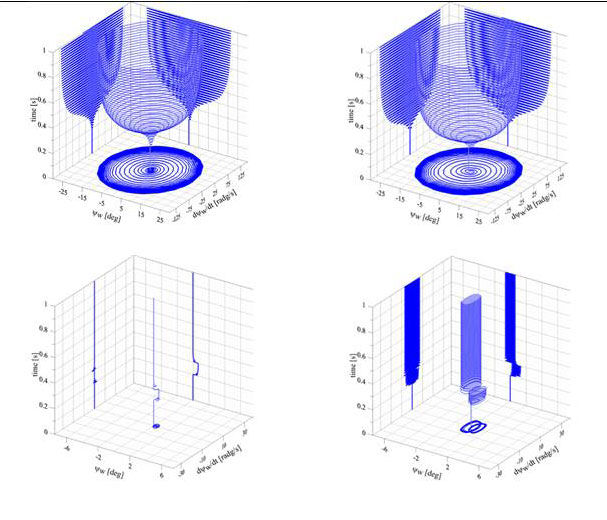
Time history of the fork-wheel assembly rotation’s angle yw and rotation velocity under the tire damage case: a) open loop results – no free play; b) open loop results – free play 1.3 deg; c) closed loop – no free play; d) closed loop result – free play 1.3 deg.


Reference
Calogero Orlando and Andrea Alaimo. A robust active control system for shimmy damping in the presence of free play and uncertainties. Mechanical Systems and Signal Processing, volume 84 (2017), pages 551–569.
Faculty of Engineering and Architecture, Kore University of Enna, Cittadella Universitaria, Enna, Italy.
Go To Mechanical Systems and Signal Processing