
Significance
Hybrid testing has become an important approach for evaluating the seismic performance of engineering structures because it integrates physical experimentation with numerical simulation in a manner that can improve both efficiency and realism. Its reliability, however, depends strongly on the accuracy of the numerical substructure, since errors in that part of the system can directly compromise the credibility of the overall response prediction. For this reason, model updating has increasingly been incorporated into hybrid testing frameworks so that unknown model parameters can be identified from experimental measurements and the numerical model can be adjusted to remain consistent with the observed structural behavior. In this context, parameter identification is not merely a supplementary computational task; rather, it is fundamental to ensuring that hybrid testing produces mechanically meaningful results throughout the loading process. The difficulty is that model updating in hybrid testing imposes unusually strict demands on the identification algorithm. The method must operate effectively within a nonlinear structural setting, must remain stable without manual intervention during testing, and must also be computationally efficient because each integration step allows only limited time for updating. These requirements have made model-based identification methods especially attractive. Compared with non-model-based approaches, they are more compatible with finite element formulations commonly used in engineering practice and retain clearer physical interpretability. Among them, the unscented Kalman filter (UKF) has become a widely adopted choice because it can handle nonlinear systems without the Jacobian-based linearization required by the extended Kalman filter, while still maintaining relatively favorable computational efficiency and implementation simplicity.
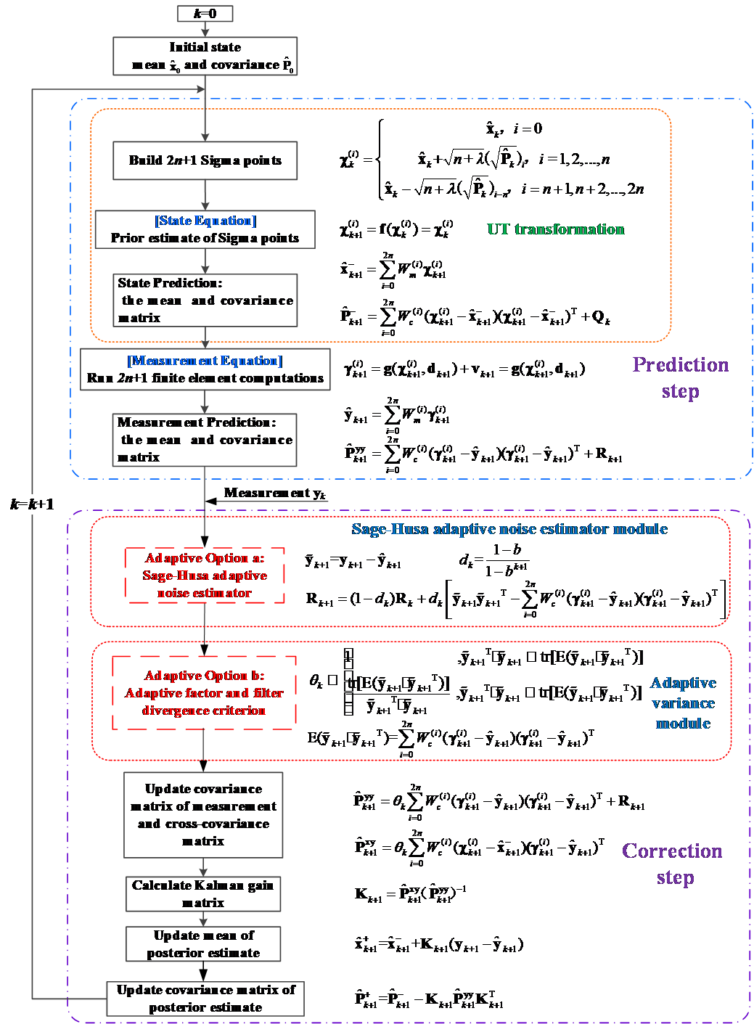
Even so, existing UKF-based approaches still exhibit a notable limitation. When the statistical characteristics of system noise are uncertain, identification accuracy may deteriorate, computational efficiency may decline, and the filter may even diverge. This issue is particularly serious in model updating hybrid testing, where reliable performance is required throughout the test and where uncertainties introduced through measurement and data transmission cannot simply be ignored. In a recent research paper published in Mechanical Systems and Signal Processing, PhD candidate Yutong Jiang, Professor Guoshan Xu, and PhD candidate Jiedun Hao from the Harbin Institute of Technology built their method around a dual adaptive unscented Kalman filter, or DAUKF. This method retains the unscented transform as the core of the state estimation process while introducing two adaptive mechanisms within the identification loop. The first is a Sage–Husa adaptive noise estimator, which updates the measurement noise covariance based on the innovation sequence, thereby assigning greater weight to recent measurement information. The second is an adaptive variance module that uses innovation behavior to detect potential divergence and accordingly adjust the predicted measurement covariance and cross-covariance. That design choice matters because it directly links the discrepancy between measured and predicted restoring force to the weighting of prediction information at the next update, allowing the estimation process to respond more carefully when disturbances begin to affect the system.
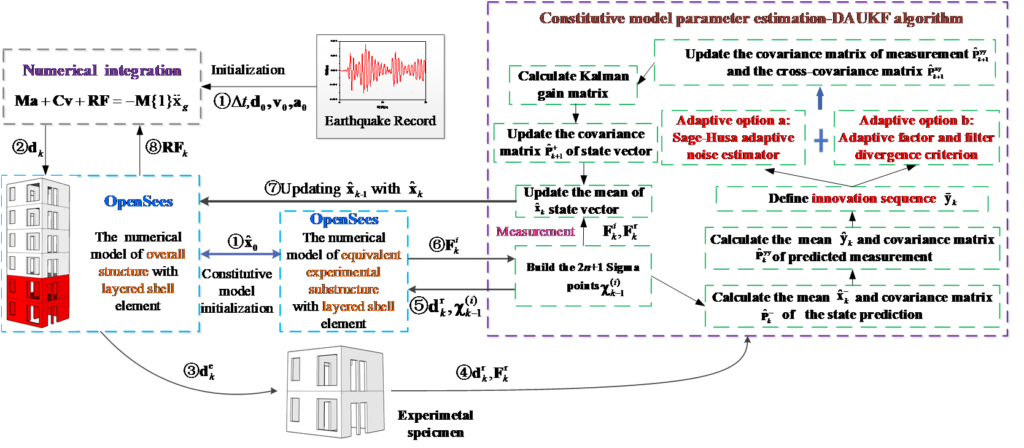
The proposed identification algorithm was embedded within a model updating hybrid testing framework. The overall structure was modeled numerically using layered shell elements, while the experimental substructure provided measured displacements and restoring forces. The constitutive parameters to be identified comprised seven PSUMAT parameters: compressive strength, tensile strength, crushing strength, peak compressive strain, crushing strain, ultimate tensile strain, and shear retention factor. Before the filtering stage began, the team used experimental data together with a Sheffield genetic algorithm to determine practical starting values for the constitutive parameter vector. This step was not introduced as part of the online model updating procedure itself, but as a way to make the subsequent identification problem well posed in a high-dimensional nonlinear setting. The first stage of evaluation assessed the feasibility of DAUKF as an identification algorithm. Using experimental hybrid-testing data, the researchers first asked the algorithm to identify one sensitive PSUMAT parameter, then two simultaneously. In both cases, the identified parameters exhibited significant fluctuations during the early stages before gradually stabilizing. Compared with the adaptive UKF utilized as a reference, DAUKF achieved closer convergence to the true parameter values and produced lower relative errors and root mean square errors (RMSEs) across the tested cases.
Subsequently, the proposed MUHTM-DAUKF framework was evaluated on a two-story precast shear wall subjected to seismic excitation. Numerical simulations initially employed the El Centro record at 70 Gal, then a broader set of ground motions and peak ground accelerations including TAFT, Kobe, Turkey, and El Centro records under multiple loading levels. Compared with MUHTM-AUKF and MUHTM-DAFA, the proposed method consistently yielded lower error indicators for the identified PSUMAT parameters and lower RMSEs for displacement responses. For the 70 Gal numerical case, the displacement RMSEs of MUHTM-DAUKF remained below 1.17%, whereas the comparison methods exceeded 10.94% and 8.97%, respectively. Parameter-identification errors followed the same pattern: the DAUKF-based method consistently yielded the smallest relative errors and RMSEs among the three methods. The new research also reports visibly dynamic adjustment of the measurement noise covariance and adaptive factor during identification, which is exactly what one would expect if the dual adaptive modules are actively responding rather than functioning as passive add-ons.
Experimental validation at the Harbin Institute of Technology extended the numerical findings into physical testing of the precast shear wall specimen. With HyTest Connector and TCP-based data transmission linking the test hardware and numerical model, the same comparison among AUKF, DAFA, and DAUKF was carried out. The displacement responses from all three approaches remained in substantial agreement with the reference response, but the DAUKF-based method again produced the lowest displacement RMSEs and the smallest parameter-identification errors. Even under experimental conditions where the initial parameter values differed substantially from the true values, MUHTM-DAUKF maintained lower relative errors and lower RMSEs than the competing approaches. Importantly, the DAUKF algorithm required the shortest average computation time per integration step, meaning that the accuracy gains were not purchased by sacrificing the efficiency required for hybrid testing.
The study of Professor Guoshan Xu and colleagues treats model updating in hybrid testing as a problem of sustained estimation under uncertainty, alongside the challenge of nonlinear parameter fitting. This shift matters because hybrid testing depends on a numerical model that is being trusted in real time while physical loading is underway. If the filter handling that updating cannot adapt when noise statistics drift or when prediction errors become abnormal, then the numerical part of the hybrid system becomes a fragile partner. By placing noise adaptation and divergence control inside the identification loop, the method makes the model updating procedure less dependent on fixed statistical assumptions and less vulnerable to poor robustness when disturbances enter through measurement and transmission. In the paper, this manifests in three ways that are hard to separate in practice: smaller parameter-identification errors, more stable tracking of constitutive parameters, and lower displacement-response errors at the structural level. In hybrid testing, slow identification increases test duration and can raise both cost and operational risk. A method that improves accuracy while also shortening the average computation time per integration step is addressing the actual operating conditions of the technique rather than an idealized offline version of it.
The study demonstrates that the layered shell finite element models with PSUMAT parameters can be effectively updated online using measured restoring-force data in a way that remains workable across multiple seismic records and loading levels. This gives the method a broader practical footing within the paper’s stated domain of seismic performance assessment for complex structures. The claim remains bounded: the evidence comes from numerical simulations and experimental validation on a two-story precast shear wall structure. Within that demonstrated range, though, the work supports a more reliable and integrated approach to combining experimental data, parameter identification, and structural response prediction within a unified hybrid testing framework.


Reference
Yutong Jiang, Guoshan Xu, Jiedun Hao, Model updating hybrid testing method based on dual adaptive unscented Kalman filter algorithm, Mechanical Systems and Signal Processing, Volume 240, 2025, 113348,
Go to Mechanical Systems and Signal Processing