
Significance Statement
Flexible structures and robots are necessary and/or indispensable:
- in winding and/or very cramped workspaces (where less invasive robots, therefore with slender links, are required);
- in the case where the end-effectors are very far from their bases, because of obstacles (rivers, buildings, etc.), or when it is impossible or not convenient to use robots with mobile bases or more cooperative robots (e.g., to build and/or maintain mega-structures, electric lines, etc.);
- in dangerous areas of work for both human operators and actuators with the electronic control (rescue and security robots);
- when the weight of the robot has to be minimized, for example to reduce the severity of potential collisions of the robot with the environment, because a flexible lightweight robot would have less impact energy.
For these reasons, the modelling and control of robots with flexible links, and more generally of flexible structures with degrees of freedom, has been a historic and complex topic of research, and it remains very interesting and significant for the scientific and engineering communities.
Currently, in fact, in the cases mentioned above, higher and higher specifications are required in terms of operating speeds and/or amplitude of work areas and security; a valid way to satisfy the previous specifications is to reduce the mass, by using suitable sections and lighter and stronger innovative materials, and to make the structures slender, i.e. to employ articulated structures having flexibility properties. Obviously, to reduce the disadvantages due to flexibility (oscillations and/or vibrations, breaking and the spillover phenomenon when the structure is controlled by a closed-loop controller), it is necessary to design advanced control systems based on reliable and efficient models.
These problems are common in several multidisciplinary engineering areas, such as robotics, mechanical, civil, aeronautical and naval.
The modelling complexity of these structures is very high both because of nonlinearity due to the motion of some parts and/or of the large link deformations, and because of possible variability of some geometrical and physical parameters.
The modelling methods used in the literature, besides being complex, have precision and/or numerical stability limitations, in particular under the hypothesis of large link deformations. Moreover, the implementation of the above modelling techniques requires quite complex software packages.
Equally, if not more complex, it is the problem of the control of such structures to impose desired movements, by limiting the annoying vibrations and/or oscillations, and by avoiding permanent deformations and/or the breakage of some parts.
The main contributions of the author in this area allow and propose to:
- provide an easy, numerically stable and computationally efficient method, that allows the modelling of a flexible robot with high precision, under the hypotheses of flexible links having varying cross-section, of large link deformations and of time-varying geometrical and/or physical parameters of both the robot and the end-effector;
- extend these results to the cases of robots with generic links and to the spatial robots, by taking into account the torsion of the links;
- give some methods to design suitable robust control laws for these robots;
- extend the above mentioned modeling, simulation and control methodologies to the case of flexible structures of civil, aeronautical and naval engineering.
Flexible structure over a cart

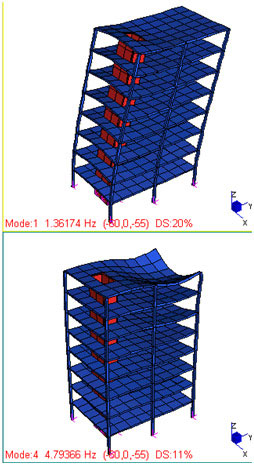
Modes of a building in seismic areas
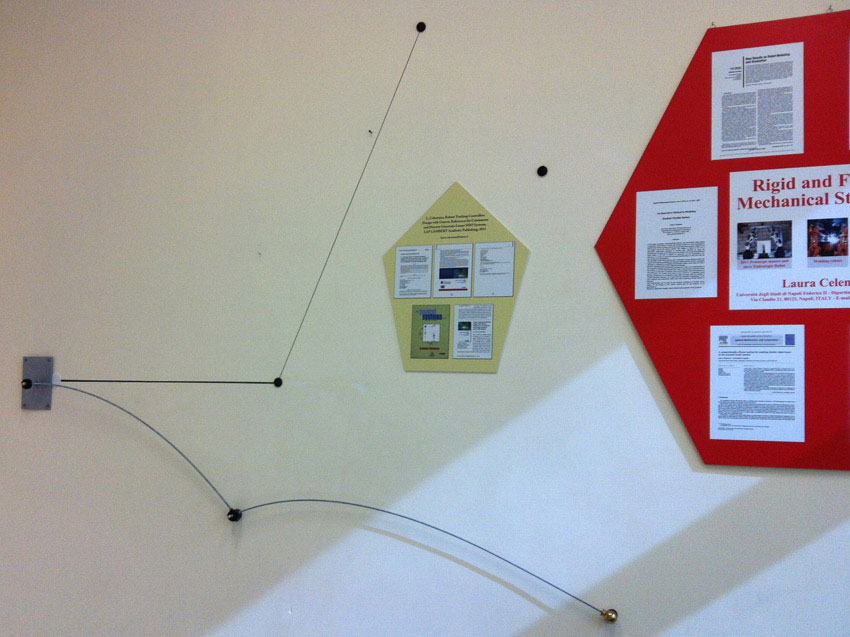
Very flexible planar robot
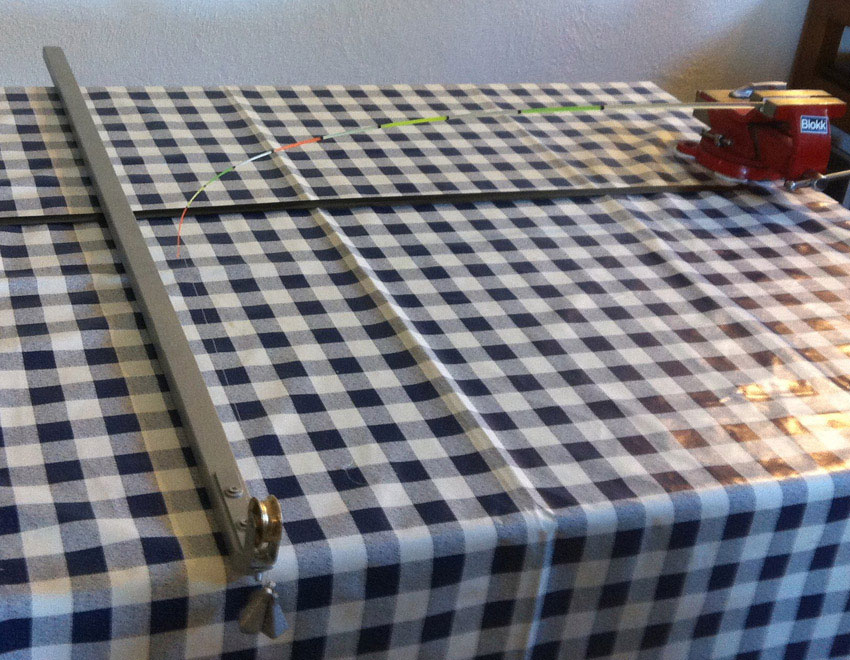
Fishing pole
Flexible crane used to plant a tree

Crane-Robot for the maintenance of skyscrapers

Robotic system Da Vinci

Surgical catheter

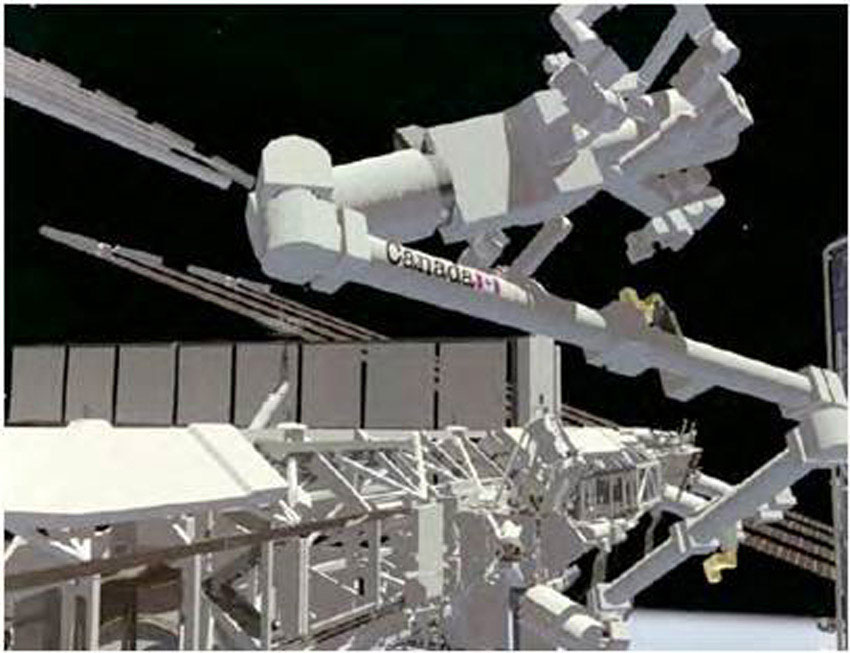
Cardarm Robot (Space Shuttle)
Airplane with flexible wings


Journal Reference
Dyn. Sys., Meas., Control138(2), 021010 (Dec 28, 2015) (12 pages).
Laura Celentano
Dipartimento di Ingegneria Elettrica , e delle Tecnologie dell’Informazione, Università degli Studi di Napoli Federico II, Via Claudio 21, Napoli 80125, Italy , e-mail: [email protected]
Abstract
In this paper, a very easy, numerically stable and computationally efficient method is presented, which allows the modeling and simulation of a flexible robot with high precision. The proposed method is developed under the hypotheses of flexible links having varying cross sections, of large link deformations and of time-varying geometrical and/or physical parameters of both the robot and the end-effector. This methodology uses the same approach of the modeling of rigid robots, after suitably and fictitiously subdividing each link of the robot into sublinks, rigid to the aim of the calculus of the inertia matrix and flexible to the aim of the calculus of the elastic matrix. The static and dynamic precision of the method is proved with interesting theorems, examples and some experimental tests. Finally, the method is used to model, control, and simulate a crane, composed of three flexible links and a cable with varying length, carrying a body with a variable mass.
Go To Dyn. Sys., Meas., Control
