
Significance
Spacecraft operating in coordinated groups depend on more than the stability of individual vehicles. In formation-based missions, each spacecraft must regulate its attitude in relation to a shared reference or leader while exchanging only limited information with neighboring spacecraft. This requirement makes attitude consensus control a central problem in distributed spacecraft systems, particularly when coordinated pointing, formation maintenance, cooperative observation, or communication tasks depend on synchronized orientation. A distributed strategy is especially valuable because it avoids reliance on a central information source and allows each spacecraft to act using local communication links, which is more consistent with the practical constraints of multi-spacecraft operation. The problem becomes more difficult when the spacecraft are not idealized as rigid bodies. Real spacecraft often carry flexible appendages such as solar arrays or antennas, and these structures can vibrate during attitude maneuvers. Such couples with the rotational motion of the spacecraft body and can degrade pointing accuracy and closed-loop performance. When this flexibility is represented directly, the spacecraft is more appropriately described as a distributed-parameter system governed by partial differential equations rather than by a finite set of rigid-body ordinary differential equations. This distinction is important because simplified modal truncation can neglect higher-frequency modes and may introduce spillover-related stability concerns. A control law designed for rigid spacecraft therefore cannot be transferred directly to flexible spacecraft without accounting for the interaction between hub attitude motion and appendage deformation. Time performance adds another layer to the control challenge. Many attitude consensus strategies guarantee only asymptotic convergence, meaning that the tracking error approaches a neighborhood of the desired state as time tends to infinity. For mission planning, this is often not sufficiently explicit. Finite-time and fixed-time control methods provide stronger guarantees, but prescribed-time control is more directly useful because the convergence time can be selected in advance. In a multi-spacecraft system, such a capability allows the designer to specify not only how accurately the followers should track the leader, but also when that tracking accuracy must be reached. Extending this idea to flexible spacecraft, however, is mathematically demanding because the controller must impose prescribed timing while also keeping structural vibration bounded.
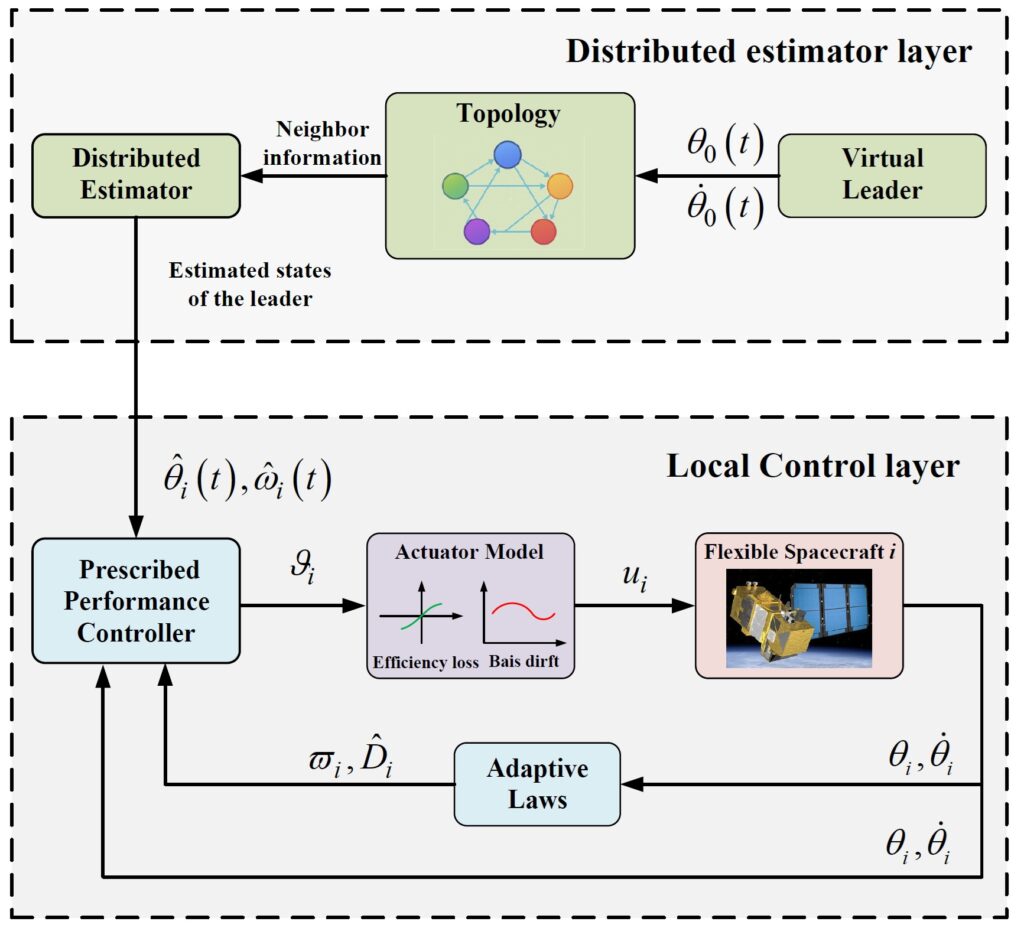
In a recent research paper published in Advances in Space Research, Professor Shilei Cao and Professor Jian Liu from Harbin Institute of Technology, together with Man Yang from HIT Satellite Technology Co., Ltd., developed a distributed hierarchical control framework for multiple flexible spacecraft. The strategy combines a prescribed-time distributed estimator for leader attitude and angular velocity with a local adaptive prescribed-performance controller based on state transformation. Its distinct technical feature is the joint enforcement of predefined convergence time and tracking accuracy while proving bounded appendage vibration under flexible rigid-body coupling. The controller uses adaptive laws and a Nussbaum-type function to handle unknown disturbances and time-varying actuator efficiency and bias drift.
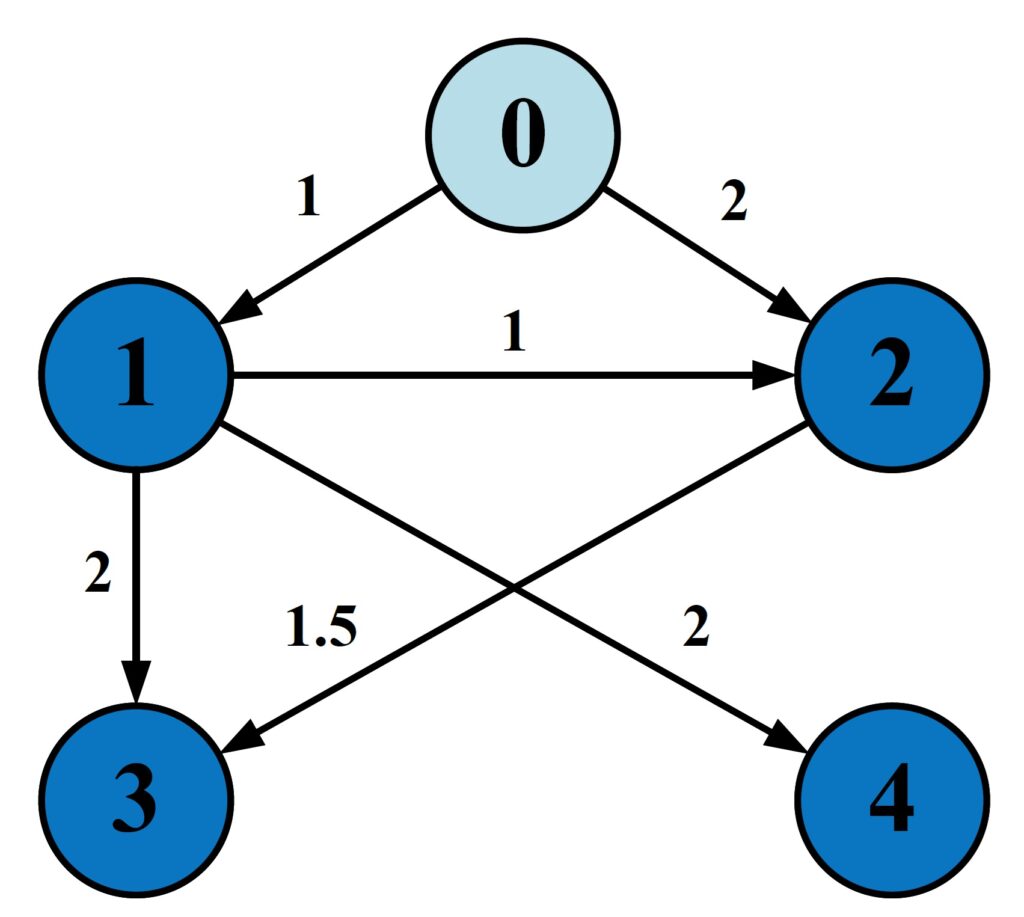
The researchers formulated each flexible spacecraft as a hub-and-appendage system, with the attitude angle describing rigid-body orientation and the appendage deformation represented over its spatial length. Hamilton’s principle was used to derive the governing PDE-based model, including the bending stiffness, linear density, central-body inertia, structural damping, control input, and external disturbance. The network was described by a directed graph with a virtual leader supplying the desired attitude reference. The graph assumption required that at least one follower receive leader information and that every spacecraft have a directed path from the leader. This is a modest but important communication condition: it allows leader information to propagate through local links rather than requiring direct leader access for every follower.
The authors organized control design in two layers. In the estimator layer, each follower spacecraft constructed prescribed-time estimates of the leader’s attitude and angular velocity from neighbor information. They used graph-theoretic properties of the communication matrix and prescribed-time Lyapunov arguments to show that the estimation errors vanish within a predefined time. This part of the design is essential because the local controller is built on the estimated leader states rather than assuming that every follower directly measures the leader. By separating leader-state reconstruction from local tracking, the strategy preserves the distributed structure while still giving each spacecraft the reference information needed for tracking.
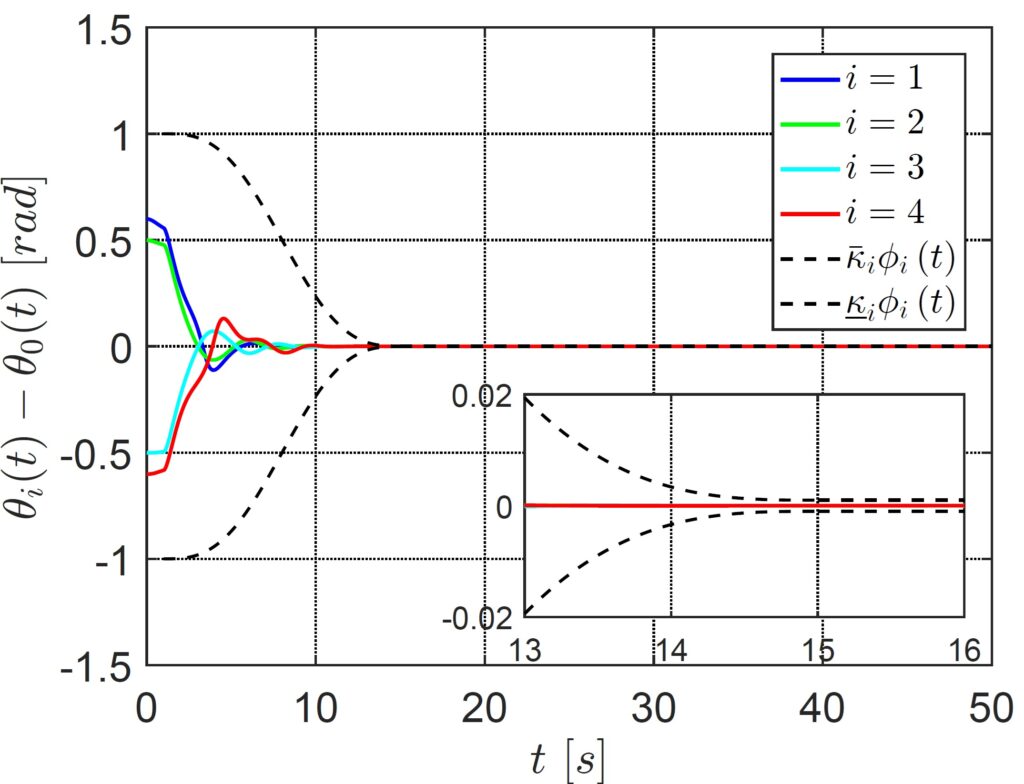
The local control layer then addressed the prescribed-performance tracking problem. The team introduced a performance boundary so that the tracking error would remain within a user-defined envelope and reach the final allowable accuracy within a specified settling time. Rather than enforcing this constrained error directly, the researchers transformed the constrained attitude error into an unconstrained variable. That design choice has a clear scientific consequence: it converts a prescribed transient-and-steady-state performance requirement into a smooth nonlinear control problem, making it possible to prove boundedness and performance preservation through Lyapunov analysis.
The adaptive controller also had to deal with time-varying actuator faults and lumped disturbances. To do this, the design incorporated a Nussbaum-type function and adaptive laws for unknown bounds, while additional terms compensated for rigid-flexible coupling between the hub attitude and appendage vibration. The stability proof combined the transformed tracking-error Lyapunov function with energy terms for the flexible appendage. A cross-energy term was introduced to handle the coupling that arises naturally in the derivative of the appendage and attitude energy. This is one of the more technically revealing parts of the research work, because it treats the vibration dynamics as part of the control proof rather than as an afterthought.
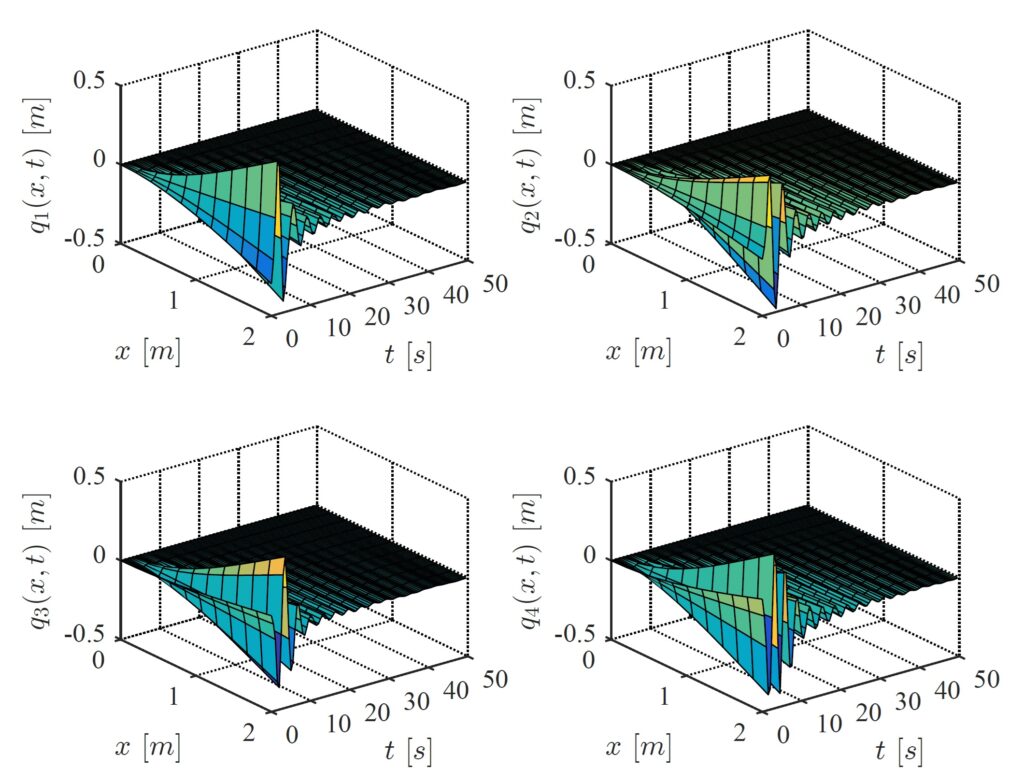
The authors performed numerical simulations and used a four-follower spacecraft network and a virtual leader under time-varying actuator faults and external disturbances. The estimator allowed the followers to recover the leader’s attitude and angular velocity within the predefined estimation time. Under the proposed control scheme, the followers tracked the leader with errors entering the prescribed bounds within the assigned 15-second settling time. Comparisons with distributed asymptotic control, distributed adaptive fault-tolerant control, and a predefined-time rigid-spacecraft control method clarified the contribution. The proposed method maintained prescribed tracking accuracy, kept appendage vibrations bounded and convergent, and did not require additional tip control forces, while the adaptive variables and control commands remained bounded in the simulations.
The engineering value of the research team findings is clearest for spacecraft formations in which orientation must be coordinated within a known operational time window. The control strategy developed by Cao, Liu, and Yang is relevant to these systems because it does not just drive the followers toward consensus eventually; it allows the convergence time and tracking accuracy to be specified in advance. A controller with prescribed-time behavior can be aligned with observation windows, coordinated pointing sequences, or formation reconfiguration periods where attitude synchronization must be completed before the next mission phase begins. The study’s simulations show the follower spacecraft tracking the leader within a predefined 15-second settling time, while keeping the tracking errors inside prescribed performance bounds. A second application lies in the control of spacecraft with large or lightly damped flexible appendages, including solar panels, antennas, booms, and other deployable structures. The authors’ PDE-based treatment is therefore useful for systems where flexible motion cannot be safely reduced to a simple rigid-body approximation.
The findings are also applicable to fault-tolerant spacecraft operation. Actuator degradation, efficiency loss, and bias drift can compromise attitude control, especially in multi-spacecraft systems where one vehicle’s tracking error may affect coordinated behavior. The proposed controller explicitly considers time-varying actuator efficiency and bias drift rather than assuming fixed fault parameters. The use of adaptive techniques and a Nussbaum-type function give the controller a mechanism to maintain prescribed-performance tracking despite uncertain actuator effectiveness. The distributed nature of the strategy gives it further engineering relevance for larger formations. Each follower estimates the leader’s attitude and angular velocity using local neighbor information, reducing reliance on global communication. The authors’ layered estimator-controller design therefore supports a practical architecture: local information exchange first reconstructs the leader state, then each spacecraft performs prescribed-performance tracking while accounting for flexibility and actuator faults.


Reference
Shilei Cao, Man Yang, Jian Liu, Distributed prescribed-time attitude consensus tracking control for multiple flexible spacecraft under time-varying actuator faults, Advances in Space Research, Volume 76, Issue 9, 2025, Pages 5309-5326,
Go to Journal of Advances in Space Research