
Significance
Bolted connections are everywhere in engineering practice, which is precisely why their behavior is so often underestimated. They appear in high-speed rail systems, bridges, ships, and countless industrial assemblies, quietly carrying load without much attention once installed. From a design perspective, bolts are attractive because they provide a clear and predictable load path, can be installed quickly, and generally perform well over long service periods. In practice, however, their performance is rarely static. Over time, vibration, repeated loading, corrosion, and environmental exposure can gradually reduce bolt preload and the early stages of loosening can be difficult to detect before more serious joint degradation begins to emerge. Previously, researchers have approached this problem using contact-based sensing techniques, including ultrasonic measurements, piezoelectric transducers, and fiber-optic sensors. These methods are technically sound and, in controlled settings, can be remarkably sensitive. The difficulty lies less in their accuracy than in their practicality. Installing sensors on large structures is time-consuming, expensive, and often intrusive. When thousands of bolts are involved, as is common in civil and transportation infrastructure, the scalability of sensor-based approaches quickly becomes questionable, especially in locations that are difficult to access during routine operation. This has motivated growing interest in vision-based alternatives. Camera systems are relatively inexpensive, non-contact, and easy to deploy across large areas. Still, existing vision-based methods have their own shortcomings. Many rely on multi-stage workflows that separately address bolt detection, perspective correction, feature extraction, and angle estimation. Each step adds computational cost and creates additional opportunities for error to accumulate. Moreover, approaches based on contours, symbols, or markers often perform well only under favorable lighting and viewing conditions, which limits their reliability in realistic inspection scenarios where perspective, background, and illumination vary unpredictably. To this end, new research paper published in Smart Materials and Structures and conducted by Professor Zhi Shan, Dr. Haolei Dou, Dr. Fanghao Wu and Professor Zhiwu Yu from the School of Civil Engineering & National Engineering Research Center for High Speed Railway Construction at Central South University, the researchers developed a unified deep-learning framework that simultaneously localizes bolts and regresses their rotational reference angles within a single inference stage. The new model captures both fine-scale texture cues and long-range contextual relationships by fusing convolutional neural networks with transformer-based attention. A periodic-aware angular regression strategy enables accurate estimation of bolt loosening angles without multi-step post-processing.
The research team captured high-resolution images of bolted assemblies using a consumer-grade smartphone, ensuring that the proposed method would not rely on specialized imaging hardware. The dataset encompassed diverse viewing angles, ranging from near-normal incidence to sharply oblique perspectives approaching seventy degrees, alongside systematically varied lighting conditions and heterogeneous backgrounds representative of real structural settings. Each image was annotated to include both bolt location and a defined reference angle derived from identifiable surface textures on the bolt head. During training, these annotations allowed the neural network to simultaneously learn spatial localization and angular regression within a single forward pass. The model architecture fused convolutional feature extraction with transformer-based attention mechanisms, enabling it to balance local detail sensitivity against global contextual awareness. Training was conducted over extended epochs using stochastic gradient descent, with augmentation strategies applied dynamically to reinforce robustness against geometric and photometric distortions.
The authors demonstrated a consistently high level of performance across all evaluated conditions. Bolt localization accuracy approached near-perfect precision and recall, confirming that the integrated framework did not compromise basic detection capability in favor of angular estimation. More importantly, the predicted reference angles exhibited modest and stable errors even under adverse perspectives and degraded lighting. The average angular deviation remained within a few degrees, indicating that the learned representation effectively captured rotational state information rather than relying on brittle geometric cues. They rotated bolts by predefined angular increments to assess loosening detection explicitly, and the model was tasked with inferring the resulting changes relative to their initial states. The computed loosening angles closely matched the imposed rotations across multiple bolts and scenarios. Notably, performance remained stable even when multiple bolts appeared simultaneously within the same image, which highlight the method’s suitability for dense inspection contexts. The team also evaluated computational efficiency during inference and found that unified architecture enabled bolt localization and angular estimation to be completed in 15ms per image, far surpassing the speed of traditional multi-stage pipelines. This real-time capability, combined with demonstrated robustness to environmental variability, represents a meaningful step toward autonomous, large-scale bolt inspection without reliance on specialized sensing infrastructure.
In conclusion, the researchers at Central South University improved vision-based bolt loosening detection and designed a single-stage inference strategy with reduced system complexity but also with enhanced robustness, a combination that is rarely achieved in practical structural monitoring applications. Indeed, their integrated design achieved real-time performance while maintaining robustness across diverse viewing conditions and backgrounds. There are many engineering implications, for instance, Infrastructure operators increasingly face pressure to inspect expansive networks under constrained budgets and limited access windows. A fast, non-contact, camera-based system capable of reliably quantifying bolt loosening angles offers a scalable alternative to sensor-intensive approaches. The demonstrated resilience to perspective distortion is particularly relevant for inspections conducted from mobile platforms or constrained vantage points, such as track-side monitoring or drone-based surveys. Moreover, the study highlights the growing value of transformer-based attention mechanisms in structural vision tasks. The proposed framework avoids the tunnel vision that can afflict purely convolutional models by selectively aggregating global and local features, especially when rotational information is encoded in surface textures. The angle-aware regression strategy further addresses the periodic nature of rotational variables, an issue that is often mishandled by conventional loss formulations. The new work also opens several avenues for future development. The new work opens several avenues for future development. Given that most bolts are hexagonal, a promising direction is to use their corner points (rather than surface textures) to define a universal reference angle. With advances in learned feature representation, this approach could ultimately lead to a single, unified model capable of detecting loosening across various hexagonal bolt types. Additionally, integration with temporal data could enable continuous monitoring of bolt behavior over time, offering early warning signals before critical loosening thresholds are reached.
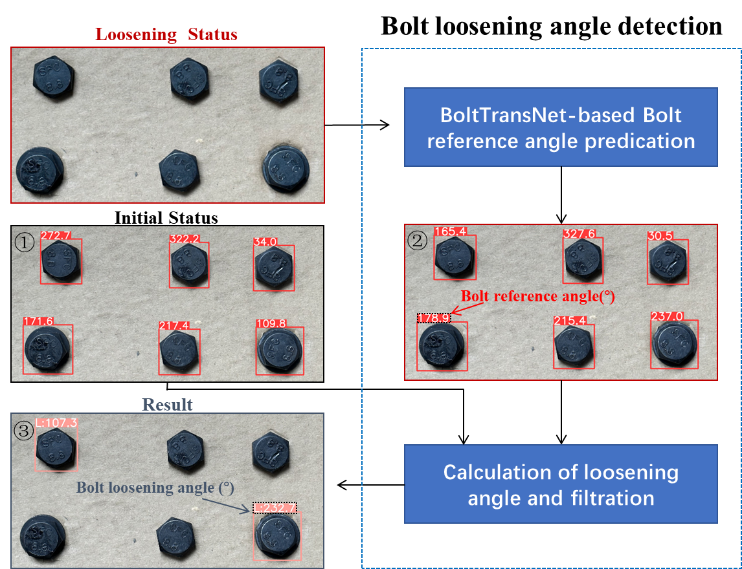
Fig. 1. The overall procedure of bolt loosening angle detection using BoltTransNet.




Reference
Shan, Zhi & Dou, Haolei & Wu, Fanghao & Yu, Zhiwu. (2025). Bolt loosening angle detection using CNN and transformer fusion network with a single inference stage. Smart Materials and Structures. 34. 10.1088/1361-665X/ade6b5.