
Significance
Recent technological advancement have seen the increase in the use of drones for different applications like military and video shooting owing to their high efficiency, low cost, reliability and real-time operations. Drones are the aerial vehicles that do not require human operators aboard. They have an interconnection of controllers, sensors and communications systems thus can monitor wide areas at ago. Unfortunately, the varying nature of applications of the unmanned aerial vehicles require different accuracy grades. On the other hand, the time required to carry out a particular monitoring operation depends on the height of the unmanned aerial vehicles. Therefore, a drone required to monitor several areas with different accuracy grades within a limited flight time requires routing and height optimization. Thus, researchers have been looking for different alternatives to address the challenge and have identified integer linear programming as a promising solution.
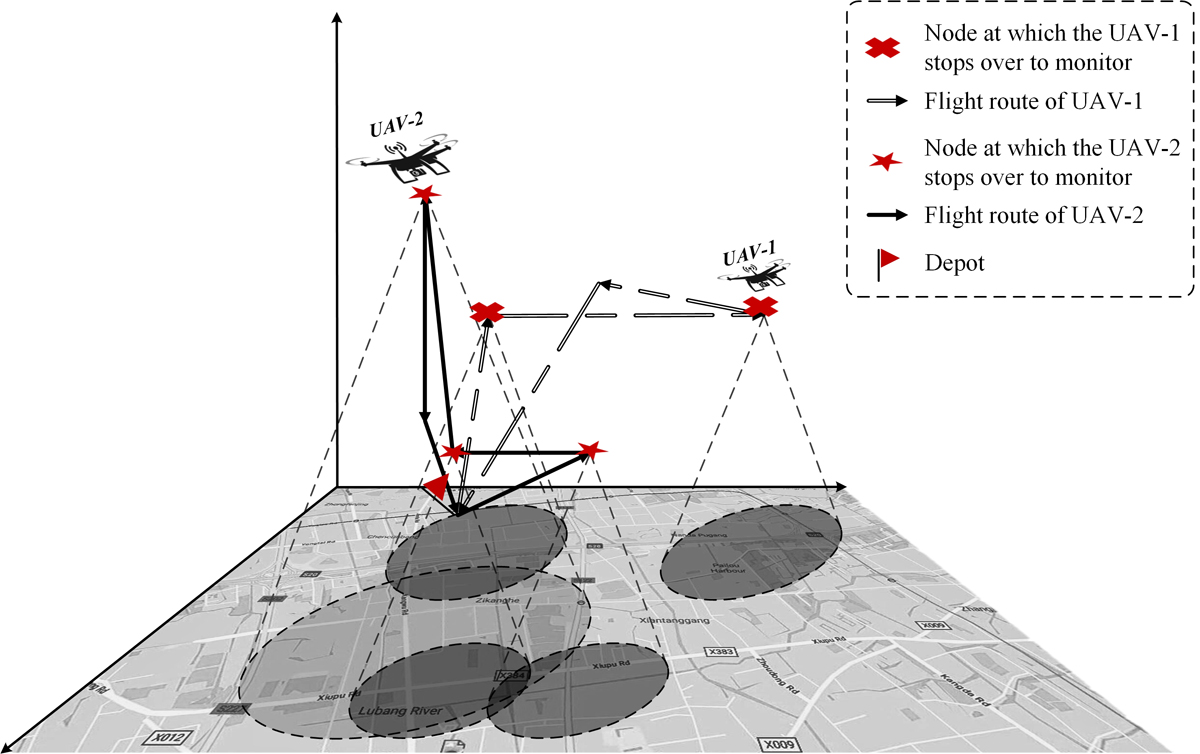
Shanghai University scientists Professor Lu Zhen, Miss Miao Li and Dr. Wencheng Wang in collaboration with Professor Gilbert Laporte at HEC Montreal in Canada developed an unmanned aerial vehicle model for routing and height selection. The authors used linear programming formula and tailored tabu search metaheuristic to obtain large scale instances solutions with fewer computations. Additionally, apart from determining the order followed in visiting the set nodes, the model also determines the height in which the node is visited. They purposed to achieve a minimal time for the tasks monitoring. Their work is currently published in the research journal, Computers and Operational Research.
To achieve their goals, it was necessary for the authors to carry out numerical experiments. For example the authors observed that the developed tabu search metaheuristic model was very efficient due to feasible solutions. For instance, it worked well with bigger instance sizes as compared to the initially used CPLEX linear programming solvers. Furthermore, it considered minimizing the number of unmanned aerial vehicles as well as other key factors during various monitoring operations. Since the all the areas to be monitored are assigned a particular soft time window, the effectiveness of the whole systems can be verified from the time at which the drone starts to monitor the particular required area.
The study successfully proposed a model for routing and height selection problem in unmanned aerial vehicles. It forms the basis for the new unmanned aerial vehicles routing problem studies despite the trade-offs between the study and the actual reality such as the varying velocities of the unmanned vehicles depending on the altitudes. Consequently, the study also takes into account the minimization of the number of unmanned aerial vehicles and other relevant factors during different scheduled monitoring operations.
Therefore, considering the increasing use of drones in different applications, Professor Lu Zhen and his colleagues are optimistic that the study will advance the design and development of more efficient drones fit for various operations. For example, future models will be extended to dynamic scenarios that also takes into consideration the varying velocities. Their study will further allow efficient energy consumption management for the unmanned aerial vehicles.






Reference
Zhen, L., Li, M., Laporte, G., & Wang, W. (2019). A vehicle routing problem arising in unmanned aerial monitoring. Computers & Operations Research, 105, 1-11.
Go To Computers & Operations Research