
Significance Statement
The design of hybrid autonomous underwater vehicles that make use of internal actuators in place of control surfaces to steer is a new technology that has emerged in the ocean engineering. The new applications of autonomous underwater vehicles require them to be capable of operating at low speeds or in harsh ocean environment i.e. strong currents. Autonomous underwater vehicles steer using control surfaces, whose performances are highly dependent on their relative velocities with respect to the fluid, therefore, making them inefficient in those circumstances. Equipping the autonomous underwater vehicles with more hydrodynamic surfaces provides a larger control force to the vehicle, however, the relative flow around the control surfaces must be accurately determined in order to obtain the desired control surface.
Professor Tsung-Chow Su and postdoctoral fellow Dr. Bo Li from Florida Atlantic University investigated the nonlinear heading control of an autonomous underwater vehicle with internal actuators. Their work focused on controlling an autonomous underwater vehicles heading angle by taking advantage of its roll-yaw coupling. They derived the nonlinear equations of motion of a REMUS AUV with the coupling between the vehicle and an internal moving mass. Their work is now published in a peer-reviewed journal, Ocean Engineering.
The kinematics and dynamics of an autonomous underwater vehicle can be established using an earth-fixed reference frame and a body-fixed reference. The earth-fixed reference frame is a North-East-Down coordinate system and the origin of the body-fixed reference frame is at the center of buoyancy of the vehicle. A local reference frame is fixed to the internal moving mass,whose origin is at the center of gravity of the mass. The buoyancy is slightly larger than gravity so the vehicle can float back to the ocean surface in case of an emergency.
The researchers presented a linear controller for the purpose of heading autopilot for the REMUS autonomous underwater vehicles with an internal moving mass. The inertia force by the internal mass affects the dynamics of the vehicle. The perturbation from the equilibrium point is caused by unmodeled disturbances. In case the vehicle is uncontrolled, its velocity and roll angle will converge rapidly to nearest stable equilibrium point. However, the internal actuator manages to stabilize the system to the desired equilibrium point. During the simulation process, the flow of the nonlinear system is reversed towards the desired stable equilibrium point in the phase space.
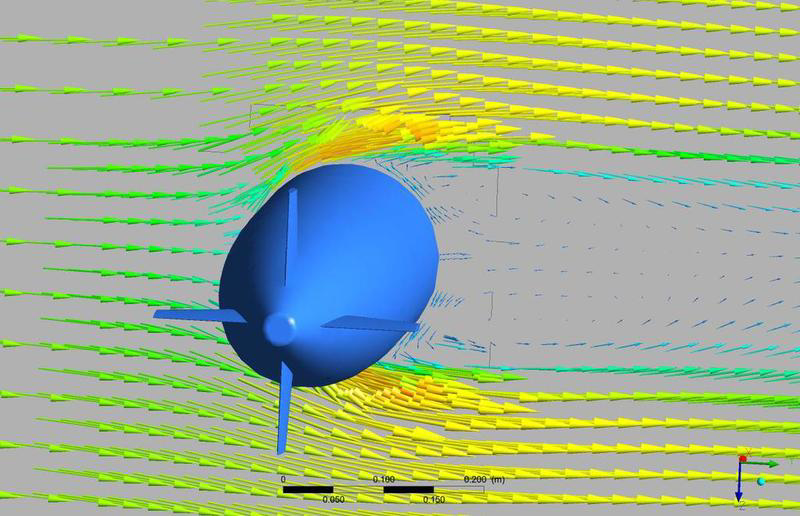
This research work proposes a strategy of stabilizing the heading angle of an underwater vehicle by using internal actuators. The control surfaces are less effective when the autonomous underwater vehicle is operating at low speed or in strong currents; internal actuators demonstrate their advantages given that they are independent of relative flows. Phase space of the dynamical system describing the vehicle’s horizontal-plane motion, the positions of equilibrium points can be altered by the lateral displacement of an internal moving mass in the vehicle, and the direction of system flow. The simulation outcomes indicate that both the position and the inertial force of the internal mass contribute to the actuation that stabilize the heading angel of the vehicle when exposed to initial perturbations.
To enhance the performance of the system under large perturbations, a tunnel thruster is introduced to the vehicle providing a thrust force in the sway direction. A non-linear full-state controller is designed to control the internal moving mass and the tunnel thruster.

Reference
Bo Li, Tsung-Chow Su. Nonlinear heading control of an autonomous underwater vehicle with internal actuators. Ocean engineering, volume 125, pages 103-112 (2016).
Department of Ocean and Mechanical Engineering, Florida Atlantic University, Boca Raton, FL 33431, USA.
Go To Ocean Engineering