
Dmitry A. Stepanenko , Vladimir T. Minchenya
Ultrasonics, February 2012
Abstract
The article presents novel design of non-contact rotary ultrasonic motor consisting of ring-shaped stator vibrating in in-plane flexural mode and rotor provided with blades. In contrast to other motors with similar design proposed motor relies on the use of standing ultrasonic waves. This simplifies design and electronic control of motor and becomes possible due to introduction of artificial asymmetry, for example by tilting one or several blades of the rotor relative to the surface normal. Operating principle of the proposed motor is based on acoustic radiation torque exerted on rotor by ultrasonic waves propagating in air or fluid gap between rotor and stator. This torque is calculated using finite element method by means of COMSOL Multiphysics software. Dynamics of rotor is studied using MathCad software and general theory of nonlinear conservative oscillators. Role of asymmetry is explained on the basis of comparative analysis of potential functions and phase trajectories for symmetric and asymmetric cases. It is shown that direction of rotation is determined by structural parameters of motor, particularly tilting direction (clockwise or counter-clockwise) of the blades. Conceptual design of motor with bidirectional rotation is described. Direction and velocity of rotation in the proposed conceptual design can be potentially controlled by changing excitation frequency of stator.
Additional Information:
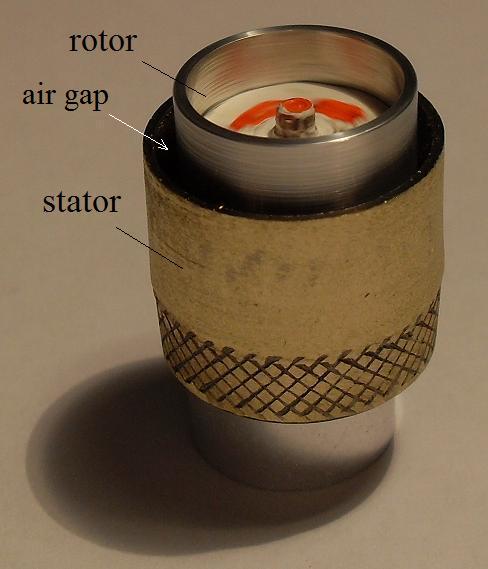
Acoustic motor presented in the photo was developed by scientists of the Belarusian national technical university (Minsk, Republic of Belarus) in cooperation with Sensotronica Co. Ltd., Resident of the High Technologies Park. Ultrasonic motors are widely used in engineering and medicine; however, most of them rely on frictional contact between stator and rotor resulting in wear and short lifetime of device. There are several works on non-contact ultrasonic motors by Chinese and Japanese scientists, particularly, by Ueha’s group (Japan); however, all these motors use travelling ultrasonic waves and several phase-shifted sources of vibration – this results in complication of design and control of the motor. In non-contact ultrasonic motors rotor is moved by so called acoustic radiation forces without direct contact between stator and rotor. These forces are also used for separation and manipulation of microparticles and living cells in microfluidic systems as well as in acoustic levitators. Advantage of the proposed motor consists in its simple design and control: it uses standing flexural waves excited in ring- shaped stator and needs only one source of vibration. Motion of rotor is created due to asymmetry of acoustic field generated by vibrating stator in air gap situated between stator and rotor. This asymmetry can be produced in different ways, for example, by using rotor with geometrically-asymmetric design. Diameter of the stator of the motor presented in the picture is about 16 mm; however, motor can be scaled to larger or smaller dimensions depending on the frequency of acoustic waves. In perspective vibrations of stator can be excited in non-contact way and rotor can be operated in liquid environments. This provides opportunities for new interesting applications of the proposed motor, for example, mixing of liquids in closed vessels. Dynamical analysis and experimental studies of the developed motor revealed several disadvantages of its design: it has unidirectional rotation and rotor can not start its motion from some initial angular positions. These disadvantages can be potentially overcome in design with two stators having different resonant frequencies. In this case direction and speed of rotation can be controlled by changing excitation frequency. This idea will be verified in the future studies. Details of dynamical analysis of the motor and results of its modelling by means of Boundary Element Method can be found in our recent publication in Nonlinear Phenomena in Complex Systems and in forthcoming publication in Proceedings of IEEE Ultrasonics Symposium to be held in Dresden.
Go to Journal